
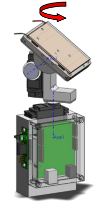
 Nous vous proposons de réaliser une tourelle Pan-Tilt supportant un laser, commandée par l'approche des mains.  Tourelle Pan/Tilt?
Le fonctionnement Pan-Tilt est celui utilisé par les dans les webcams motorisées.
Cliquer sur l'image ci-contre
Les activités proposées sont les suivantes :
La séquence durera 12 semaines au total, pendant laquelle vous réaliserez 5 activités.
Tourelle Pan/Tilt?
Le fonctionnement Pan-Tilt est celui utilisé par les dans les webcams motorisées.
Cliquer sur l'image ci-contre
Les activités proposées sont les suivantes :
La séquence durera 12 semaines au total, pendant laquelle vous réaliserez 5 activités.
|
| Question sociétale | Comment peut-on imprimer des pièces en 3 dimensions? |
|---|---|
| Objectif | Modéliser la ou les pièces avec un logiciel de CAO (SolidWorks dans notre cas) en vue de réaliser le mécanisme tourelle Pan/Tilt du laser du robot. Remarque : demander à l'enseignant de vous présenter la tourelle qui nous servira de base de construction. |
| Durée | L'activité se déroule sur 2 semaines à raison de 2H par semaine et peut s'étendre à 3 semaines selon votre intérêt. |
| Déroulé de l'activité |
Sous activité 1.1 : Introduction à l'impression 3D
|
| Question sociétale | Comment les robots aspirateurs fonctionnent-ils?
 Cliquer sur l'image pour voir la vidéo
Cliquer sur l'image pour voir la vidéo
|
|---|---|
| Objectif |
|
| Durée | L'activité se déroule sur 2 semaines à raison de 2H par semaine. |
| Déroulé de l'activité |

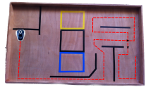
Préambule : Pour procéder aux essais du robot, vous disposez du plateau en bois ci-contre. Les zones ou les parcours sont notés de A à G Demander des casques aux professeurs responsables pour les activités à venir. Sous activité 3.1 : Présentation du robot Moway et de l'interface de programmation
 Sous activité 3.5 : Imposer un chemin précis à au robot
Sous activité 3.5 : Imposer un chemin précis à au robot
On souhaite à présent que le robot suive le chemin indiqué ci-contre
|
| Question sociétale |
 Comment est-il possible de contrôler la position de la tourelle en fonction de la position de nos mains ?
Comment est-il possible de contrôler la position de la tourelle en fonction de la position de nos mains ?
|
|---|---|
| Objectif | Comprendre les rudiments du langage de programmation des cartes Arduino en vue de contrôler la position de la tourelle en fonction de la position des mains. Le but ultime dans le cadre des enseignements d'exploration est d'être capable de réaliser l'acquisition de l'information fournie par des capteurs ultrasonores, de traiter cette information de sorte à commander les servo-moteurs Pan et Tilt de la tourelle. Remarque : demander aux enseignants présents de vous montrer les servo-moteurs ainsi que les capteurs ultrasonores qui seront utilisés sur la tourelle. |
| Durée | L'activité se déroule sur 2 semaines à raison de 2H par semaine et peut s'étendre à 3 semaines selon votre intérêt. |
| Déroulé de l'activité |
Pour réaliser cette activité nous allons essentiellement travailler avec la chaîne YouTube "U=RI" d'Alexandre PAILHOUX. Il propose des vidéos relatives à Arduino et de complexité croissante. La plupart des vidéos nécessites de les visualiser dans l'ordre croissant d'ajout sur la chaîne. Aussi, si vous décidez de regarder l'intégralité des vidéos, je vous conseille de vous rendre sur sa chaîne et de paramétrer l'affichage de la manière suivante : "Date d'ajout (la plus ancienne)". Le but ici est bien évidemment de vous faire programmer la carte Arduino et d'y connecter divers périphériques (Leds, Capteurs ultra-sonores et servo-moteurs). Aussi pour progresser, il est nécessaire de visionner les vidéos et de réaliser les mêmes activités proposées sur la chaîne YouTube au fur et à mesure. Il est vivement conseillé de sauvegarder vos programmes dans votre répertoire "mes devoirs" sur le réseau du lycée. Prendre des notes n'est pas un luxe non plus... Sous activité 2.1 : Qu'est ce qu'Arduino?

|
| Question sociétale sous activité 4.1 | Pourquoi personne ne s'évanouit dans les manèges? Suivez ce lien et remarquez la valeur en G à laquelle le futur pilote s'évanouit..y a encore du boulot!! |
|---|---|
| Question sociétale sous activité 4.2 | Comment prédéterminer les performances (vitesse et accéléraion) d'une voiture télécommandée si la voiture est allégée?

|
| Objectif |
|
| Durée | L'activité se déroule sur 2 semaines à raison de 2H par semaine. |
| Déroulé de l'activité |
Les deux sous-activités sont disjointes de la thématique globale relative à la tourelle Pan-Tilt. Elles ont pour objectif de montrer un aperçu des activités qui pourraient être menées sans le cadre d'un enseignement de sciences de l'ingénieur (Bacs Sciences de l'ingénieur et Sciences Technique Industriel de Développement Durable).
Nous désirons déterminer la vitesse maximale du bras pour éviter l'évanouissement des personnes présentes dans la nacelle. Nous rappelons que l'évanouissement n'est
lié à la vitesse mais à l'accélération subie par les passagers. La nacelle tournant parfois en même temps que le bras, cela entraîne une accélération
susceptible de dépasser la valeur maximale de 6g imposée pour les manèges. (1g = 9,81 m/s²).
Pour vos essais, vous animerez la nacelle d'une vitesse constante et déterminerez la vitesse maximale à ne pas dépasser pour ne pas excéder 4g.
Nous estimons la longueur de bras à 20 m (10 m de part et d'autre), celle de la nacelle à 3 m et celle du mât de 15 m. Nous vous invitons à regarder la vidéo ci-contre tout en reproduisant au fur et à mesure les manipulations réalisées dans la vidéo. Pour cela ouvrir le logiciel SolidWorks. Une fois la maitrise du concept et de l'outil acquise vous serez en mesure de satisfaire au cahier des charges énoncé plus haut. Si vous avez des difficultés à obtenir le même résultat que la vidéo explicative, prenez le temps de visionner cette dernière vidéoSi malgré cela vous n'arrivez pas à réaliser le modèle en représentation schématique, vous pouvez le télécharger ici Sous-activité 4.2 : Quantifier l'impact sur l'accélération et la vitesse de la voiture Tamiya électrique dans le cas d'un allègement de masse.
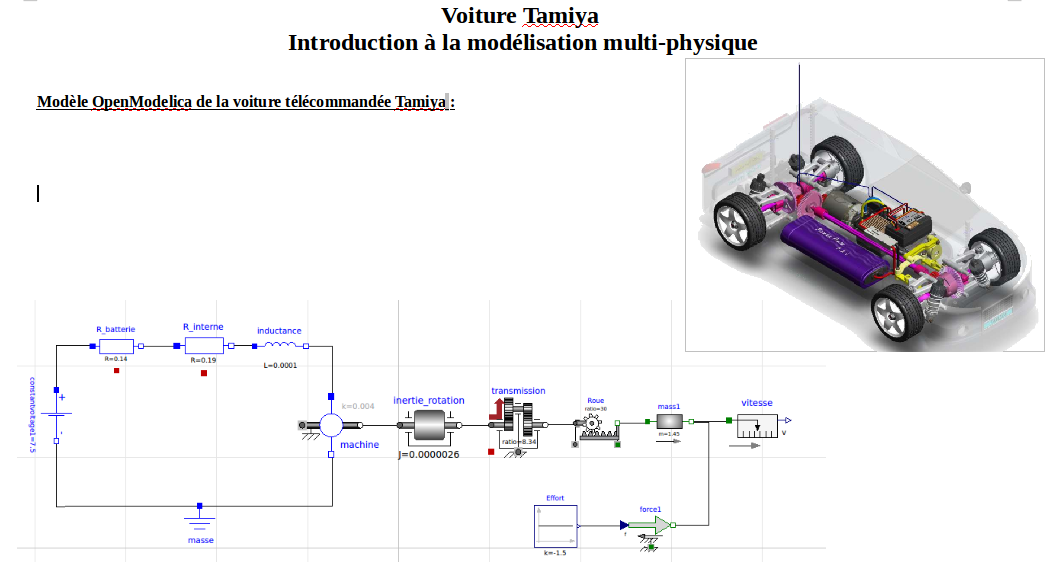
Vous comprennez bien que le fait de modifier le matériau de la carroserie va changer la masse de la voiture. Vous allez utiliser le logiciel SolidWorks pour déterminer la nouvelle masse de la carosserie. |
 Il existe un très grand nombre de langage de programmation, chacun avec leurs avantages et inconvénients (C/C++, C sharp, Visual Basic, Java etc). Nous vous proposons ici de vous initier au langage Python pour plusieurs raisons :
Pour cet apprentissage de la programmation nous utiliserons le site France IOI.
Conseils : |
|
Groupes semestre 1 Groupes semestre 2 |