Espace dédié aux enseignements d'exploration de Seconde SI
item
....
Présentation des activités des enseignements d'exploration
Les robots sont de plus en plus fréquents dans notre environnement avec des misssions très variées.
Le robot présenté dans la vidéo ci-contre est un le robot d'inspection avec un bras de 24 pouces. Cliquer sur l'image pour voir la vidéo
Le bras est utilisé pour soulever la caméra (ou webcam) pour l'inspection en direct des endroits difficiles d'accès.
Le robot dispose également d'une sonde de sol qui peut se retourner sur des morceaux de bois pour l'inspection de termites.
Qu'allons nous faire? :
Nous vous proposons lors de ces enseignements d'exploration de s'appuyer sur un vieux chassis (toujours équipée de son électronique d'origine) d'une voiture télécommandée ci-contre
et de réaliser des activités vous conduisant à optimiser le fonctionnement d'une part du chassis et d'envisager de le transformer en un robot d'inspection.
La gestion de flux issu de la caméra étant complexe, nous nous limiterons à la commande en direction d'un laser qui fera office de caméra!
Tourelle Pan/Tilt?
Il est souhaitable que la caméra (pour nous le laser) soit dirigeable à l'image d'une webcam. Ce fonctionnement est appelé Pan/Tilt.
Les activités proposées sont les suivantes :
La séquence durera 12 semaines au total, pendant laquelle vous réaliserez 4 activités.
Activité 1 : Conception et impression 3D d'un mécanisme pour obtenir un fonctionnement tourelle "Pan/Tilt" pour le laser.
Activité 2 : Initiation à la programmation sur carte Arduino
Activité 3 : Initiation au structure algorithmique avec le robot Moway.
Activité 4 : cette activité se décline en 3 sous-activités montrant un aperçu des activités menées dans le cadre d'un bac S Sciences de l'ingénieur.
Sous activité 3.1 : Introduction à la cinématique et à la dynamique avec SolidWorks
Sous activité 3.2 : Estimation des performances d'un véhicule télécommander par la modélisation multi-physique.
Activité 1 :"Conception et impression 3D du mécanisme tourelle Pan/Tilt"
Question sociétale
Comment peut-on imprimer des pièces en 3 dimensions?
Objectif
Modéliser la ou les pièces avec un logiciel de CAO (SolidWorks dans notre cas) en vue de réaliser le mécanisme tourelle Pan/Tilt du laser du robot.
Remarque : demander aux enseignants présents de vous montrer le laser.
Durée
L'activité se déroule sur 3 semaines à raison de 2H par semaine.
Déroulé de l'activité
Sous activité 1.1 : Introduction à l'impression 3D
Prendre connaissance de la vidéo introductive à l'impression 3D : vidéo introductiveVous pouvez demander des doubleurs de casques ainsi que des casques aux enseignants présents.
Par ailleurs, le document de présentation de la vidéo est disponible ici.
Sous activité 1.2 : Etre capable de réaliser une pièce en 3D avec SolidWorks
Très Important : Copier le dossier "EtauComplet2010" présent sur votre espace classe dans votre espace personnel "Devoirs"
Ouvrir le logiciel SolidWorks et reproduire au fur et à mesure les pièces réalisées dans les tutoriels vidéos suivants.
>Sous activité 1.3 : Réaliser un assemblage de pièces
Ouvrir le logiciel SolidWorks puis depuis SolidWorks ouvrir l'assemblage EtauComplet.SLDASM. Cet assemblage correspond au travail final que nous vous proposons dans la présente activité.
Visionner la vidéo ci-contre qui vous montrent l'objectif de la présente sous-activité et vous présente quelques rudiments indispensables à l'utilation de SolidWorks.
Depuis SolidWorks, ouvrir le fichier "etauCompletSansContrainte.SLDASM" et visionner les vidéos suivantes et reproduire
au fur et à mesure les assemblages réalisées dans les tutoriels vidéos suivants.
Sous activité 1.4 : Création, impression pièce support laser
Avec l'aide de l'enseignant responsable et son accord vous disposez du reste du temps imparti pour concevoir, dessiner et imprimer une pièce contribuant à la réalisation du bras articulé .
Contraintes : ne disposant d'un seul laser, vous devez prévoir un démontage très aisé. Le robot étant susceptible de rentrer en collision,
il est nécessaire que le laser soit bien fixé et le support suffisament solide.
Activité 2 :"Introduction à la programmation des cartes Arduino"
Question sociétale
Comment est-il possible de contrôler le bras du robot ?
Objectif
Comprendre les rudiments de langage de programmation des cartes Arduino en vue de réaliser le contrôle des articulations du bras du robot
Remarque : demander aux enseignants présents de vous montrer les servo-moteur qui seront utilisés sur le bras.
Durée
L'activité se déroule sur 3 semaines à raison de 2H par semaine.
Déroulé de l'activité
Sous activité 2.1 : Présentation de Arduino
Prendre connaissance de la vidéo ci-contre : Arduino-Partie1
Vous pouvez demander des doubleurs de casques ainsi que des casques aux enseignants présents.Par ailleurs, le document de présentation de la vidéo est disponible ici.
Sous activité 2.2 : Allumer une Led, la faire clignoter puis un petit chenillard
Prendre connaissance des vidéos ci-après : Arduino-Partie2 et Arduino-Partie 3
Sous activité 2.3 : Allumer une led si l'on appuie sur le bouton poussoir
Prendre connaissance de la vidéo ci-après : Arduino-Partie4.1 et Arduino-Partie4.2
Sous activité 2.4 : Utiliser la communication série
Prendre connaissance de la vidéo ci-après : Arduino-Partie5-Communication Serie
Sous activité 2.5 : Gestion des entrées analogiques
Prendre connaissance de la vidéo ci-après : Arduino-Partie6.1 et 6.2 -Gestion des entrées analogiques
Sous activité 2.6 : Gestion des sorties analogiques
Prendre connaissance de la vidéo ci-après : Arduino-Partie7.1-Gestion des sorties analogiques
Activité 3 :Activité "Comprendre et décrire le fonctionnement automatique des robots"
Question sociétale
Comment les robots aspirateurs fonctionnent-ils?Cliquer sur l'image pour voir la vidéo
Objectif
Découvrir les capteurs qui contribuent aux automatismes du robot.
Appréhender les structures algorithmiques de base.
Durée
L'activité se déroule sur 3 semaines à raison de 2H par semaine.
Déroulé de l'activité
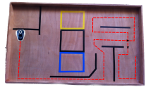
Préambule : Pour procéder aux essais du robot, vous disposez du plateau en bois ci-contre. Les zones ou les parcours sont notés de A à G
Demander des casques aux professeurs responsables pour les activités à venir.Sous activité 3.1 : Présentation du robot Moway et de l'interface de programmation
Visionner les vidéos de présentation du robot Moway et du logiciel Moway World et répondre aux questions suivantes :
Quelles sont les conditions à satisfaire pour téléverser un programme dans le robot?
Décrire le protocole pour utiliser l'interface "RC Control"
Ouvrir le logiciel mOway World et lancer l'application "RC control". Tester l'interface de communication avec le robot et préciser quelles sont les informations recueillies et les actions suceptibles d'être ordonnées au robot.
Sous activité 3.2 : Comprendre comment les robots détectent les surfaces
Quitter l'application "RC control" et téléverser le programme "enclosured.mpj". Vérifier le comportement du robot à l'intérieur des cadres "A", "B" et "C" du plateau en bois fourni pour les essais. Que constatez-vous?
A partir de l'interface "RC control", définir un protocole expérimental permettant de caractériser les informations "vues" par le robot depuis ses capteurs de ligne.
Procéder aux essais et consigner les résultats.
Re-programmer le robot pour qu'il fonctionne dans le cadre "Bleu" tel qu'il le fait dans le cadre "Noir".
Sous activité 3.3 : Comprendre comment les robots évitent les obstacles
Re-téléverser le programme Enclosured.mpj" et tester le sur le cadre "D"
Vous allez devoir programmer le robot pour que son comportement soit dans le cadre "D" le même que dans le cadre "Noir". Pour mener à bien le programme, il est nécessaire de comprendre comment le robot détecte les obstables.
Proposer un protocole permettant de caractériser les valeurs "vues" par le robot par les capteurs infra-rouge frontaux et de côté et ce en fonction de la distance des obstacle.
Besoin d'aide ...? Cela suffira-t-il?
Programmer le robot pour satisfaire au fonctionnement dans le cadre "D" et tester le.
Remarque : on désire que l'évitement de l'obstacle se fasse au dernier moment et en utilisant uniquement les capteurs infra-rouges frontaux.
Positionner le robot n'importe où sur le plateau (hors d'un cadre) et laisser le évoluer quelques temps de manière à noter un comportement au regard des obtacles non acceptable et modifier votre programme en conséquence.
Sous activité 3.4 : Comprendre la fonction "Wall Folow" présente sur certain aspirateur
Téléverser le programme SuiveurLigne.mpj" et tester le sur le parcours E. Analyser le programme et remédier au dysfonctionnement.
Sous activité 3.5 : Imposer un chemin précis à au robot
On souhaite à présent que le robot suive le chemin indiqué ci-contre
Programmer le robot pour satisfaire au cahier des charges (suivre le chemin et s'arrèter à la fin).
Il est conseillé de procéder par étape. Ne pas essayer de réaliser le programme complet d'un seul coup.
On vous rappelle que le robot est équipé d'un codeur sur chacune des roues lui permettant de savoir la distance qu'il a parcouru.
Activité 4 :Activité "Utilisation de modèles pour prédire les performances"
Question sociétale
...
Objectif
Découvrir le modèle volumique conjointement à la modélisation multiphysique dans le but de prédéterminer des performances
Durée
L'activité se déroule sur 3 semaines à raison de 2H par semaine.
Déroulé de l'activité
Cette activité est articulée autour de 2 sous-activités :
Sous-activité 4.1 : Prédéterminer les performances cinématiques et dynamiques du bras de robot.
Sous-activité 4.2 : Prédéterminer les performance de la voiture Tamiya électrique
Sous-activité 4.1 : Prédéterminer les performances cinématiques et dynamiques du bras de robot.
Nous désirons dans un premier temps déterminer les caractéristiques suivantes des points A et B :
Trajectoires
Vitesses
Accélérations
Les conditions d'essais sont les suivantes :
OA=17cm et AB =17cm
Angle et vitesse de rotation moteur en 0 : 180° et 15 tr/min.
Angle et vitesse de rotation moteur en A : 360° et 15 tr/min.
Puis dans un deuxième temps estimer les caractéristiques suivantes des servo-moteurs positionnés en A et B :
Puissances
Couple
Les conditions d'essais sont les suivantes :
Masse des bras estimé à 50 g chacun.
Masses des servo-moteurs : à mesurer.
Centre de gravité : à estimer.
La question que vous vous posez est : "Comment faire quand on a aucune base scientifique de cinématique et de dynamique ..?"
Nous vous invitons à regarder la vidéo ci-contre tout en reproduisant au fur et à mesure les manipulations réalisées dans la vidéo.
Pour cela ouvrir le logiciel SolidWorks
Une fois la maitrise du concept et de l'outil acquise vous serez en mesure de satisfaire au cahier des charges énoncés plus haut.
Si vous avez des difficultés à obtenir le même résultat que la vidéo explicative, prenez le temps de visionner cette dernière vidéo
Sous-activité 4.2 : Prédéterminer les performances de la voiture Tamiya électrique.
Nous souhaitons prédéterminer les nouvelles performances cinématiques de la voiture radio-télécommandée Tamiya pour la modification suivante :
Dans un but esthétique, nous souhaitons remplacer la carroserie actuelle(en plastique ABS) par une belle carroserie en fer à l'ancienne.
Cependant si les performances s'en trouvent diminuées (ce qui est prévisible) il faudra trouver une solution pour que les performances soient de
nouveau acceptables.
Avant d'envisager l'utilisation du modèle multiphysique, il est cependant nécessaire de vérifier certains paramètres du modèle.
Nous vous invitons dans un premier temps à prendre connaissance de la vidéo ci-contre de présentation la voiture Tamiya.
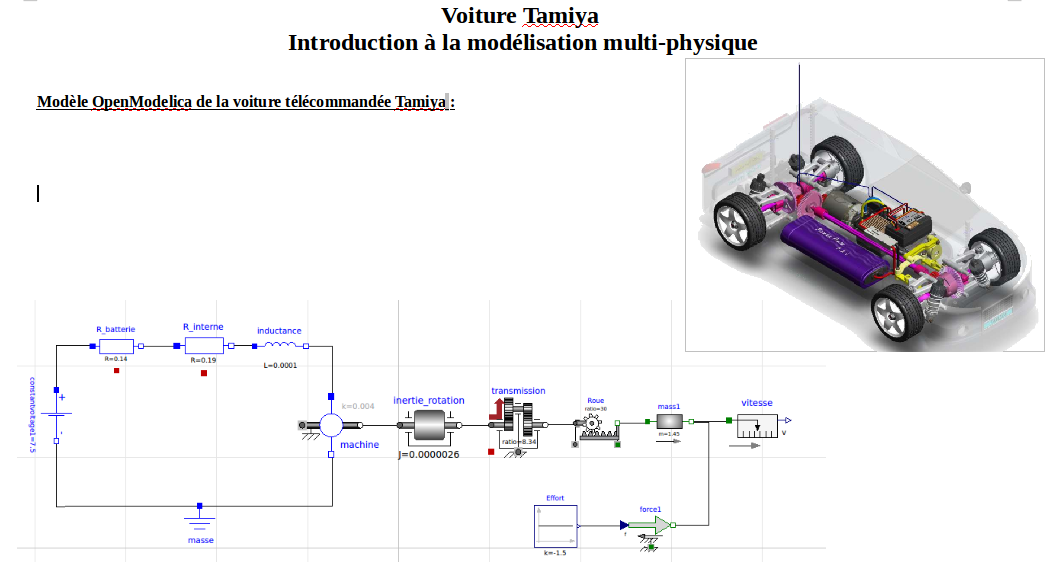
Il est temps à présent de comprendre le modèle multi-physique. Imprimer le document suivant
et à partir de la vidéo ci-contre indiquer très distinctement où sont modélisés :
La batterie,
Le moteur à courant continu,
Les engrenages,
La rotation des roues sur le sol,
La résistance au déplacement de la voiture.
Tentez une explication de ce que réprésente l'élément repéré "J" dans le modèle multi-physique.
Assez de théorie.. c'est quand la pratique?
Maintenant! Prenez le temps de visionner la vidéo ci-contre et réalisez au fur et à mesure sur le logiciel "OpenModelica"
l'ensemble des manipulations proposées dans la vidéo.
Le modèle est téléchargeable ici
Modifier les paramétrages du modèle pour qu'ils soient conforment au document ci-contre puis déterminer la vitesse maximale atteinte ainsi que le temps mis par la voiture pour atteindre cette vitesse.
Peser la voiture et modifier le cas échéant le modèle multi-physique. En déduire les nouvelles performances cinématiques.
Le ratio "roue" est exprimé en rad/m. Il correspond au nombre de radians effectués par la roue pour un mètre parcouru. Proposer un protocole expérimental à partir de la voiture réelle pour vérifier ce ratio.
On se propose à présent de remplacer la carroserie actuellement en ABS (plastique si vous préférez) par une carroserie en fer dans le but de donner à cette voiture un style "rétro". Il vous faudra vérifier les nouvelles performances cinématiques après modification.
Vous comprennez bien que le fait de modifier le matériau de la carroserie va changer la masse de la voiture. Vous allez utiliser le logiciel SolidWorks pour déterminer la nouvelle masse de la carosserie.
Nous vous invitons dans un premier temps à visionner la vidéo ci-contre qui vous explique comment modifier les matériaux dans un modèle volumique et d'en déduire la nouvelle masse.
Le modèle volumique SolidWorks de la carrosserie est téléchargeable ici
Réaliser un tableau permettant de consigner les informations suivantes:
La masse de la carrosserie réelle,
La masse de la carrosserie selon le modèle volumique.
Comparer les deux masses obtenues et définir le cas échéant un coefficient correcteur.
Modifier l'ABS par du Fer dans le modèle volumique de la carrosserie puis ré-investir les résultats précédents pour déterminer les nouvelles performances cinématiques de la voiture Tamiya.

 Les robots sont de plus en plus fréquents dans notre environnement avec des misssions très variées.
Le robot présenté dans la vidéo ci-contre est un le robot d'inspection avec un bras de 24 pouces. Cliquer sur l'image pour voir la vidéo
Le bras est utilisé pour soulever la caméra (ou webcam) pour l'inspection en direct des endroits difficiles d'accès.
Le robot dispose également d'une sonde de sol qui peut se retourner sur des morceaux de bois pour l'inspection de termites.
Les robots sont de plus en plus fréquents dans notre environnement avec des misssions très variées.
Le robot présenté dans la vidéo ci-contre est un le robot d'inspection avec un bras de 24 pouces. Cliquer sur l'image pour voir la vidéo
Le bras est utilisé pour soulever la caméra (ou webcam) pour l'inspection en direct des endroits difficiles d'accès.
Le robot dispose également d'une sonde de sol qui peut se retourner sur des morceaux de bois pour l'inspection de termites.
 Qu'allons nous faire? :
Nous vous proposons lors de ces enseignements d'exploration de s'appuyer sur un vieux chassis (toujours équipée de son électronique d'origine) d'une voiture télécommandée ci-contre
et de réaliser des activités vous conduisant à optimiser le fonctionnement d'une part du chassis et d'envisager de le transformer en un robot d'inspection.
La gestion de flux issu de la caméra étant complexe, nous nous limiterons à la commande en direction d'un laser qui fera office de caméra!
Qu'allons nous faire? :
Nous vous proposons lors de ces enseignements d'exploration de s'appuyer sur un vieux chassis (toujours équipée de son électronique d'origine) d'une voiture télécommandée ci-contre
et de réaliser des activités vous conduisant à optimiser le fonctionnement d'une part du chassis et d'envisager de le transformer en un robot d'inspection.
La gestion de flux issu de la caméra étant complexe, nous nous limiterons à la commande en direction d'un laser qui fera office de caméra!
 Tourelle Pan/Tilt?
Il est souhaitable que la caméra (pour nous le laser) soit dirigeable à l'image d'une webcam. Ce fonctionnement est appelé Pan/Tilt.
Les activités proposées sont les suivantes :
La séquence durera 12 semaines au total, pendant laquelle vous réaliserez 4 activités.
Tourelle Pan/Tilt?
Il est souhaitable que la caméra (pour nous le laser) soit dirigeable à l'image d'une webcam. Ce fonctionnement est appelé Pan/Tilt.
Les activités proposées sont les suivantes :
La séquence durera 12 semaines au total, pendant laquelle vous réaliserez 4 activités.
 Cliquer sur l'image pour voir la vidéo
Cliquer sur l'image pour voir la vidéo

 Sous activité 3.5 : Imposer un chemin précis à au robot
Sous activité 3.5 : Imposer un chemin précis à au robot