Accès à la présentation de la trottinette.
COMMANDE DU FONCTIONNEMENT DU PRODUIT
Les trottinettes électriques en libre-service dans l’agglomération de Lyon sont de plus en plus nombreuses et parfois louées par des utilisateurs non expérimentés. Dans certaines zones particulièrement fréquentées par des piétons, il convient de limiter les risques de collision. La ville souhaite limiter la vitesse des trottinettes à 8 km·h-1 dans les zones piétonnes et 25 km·h-1 ailleurs.
Problématique : Comment adapter la limitation de vitesse de la trottinette en fonction de la zone dans laquelle elle est utilisée ?
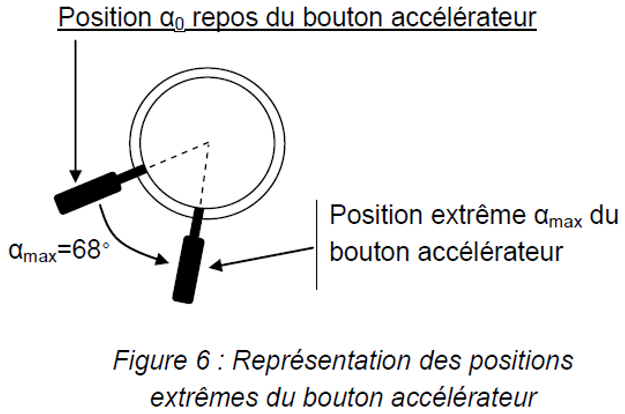
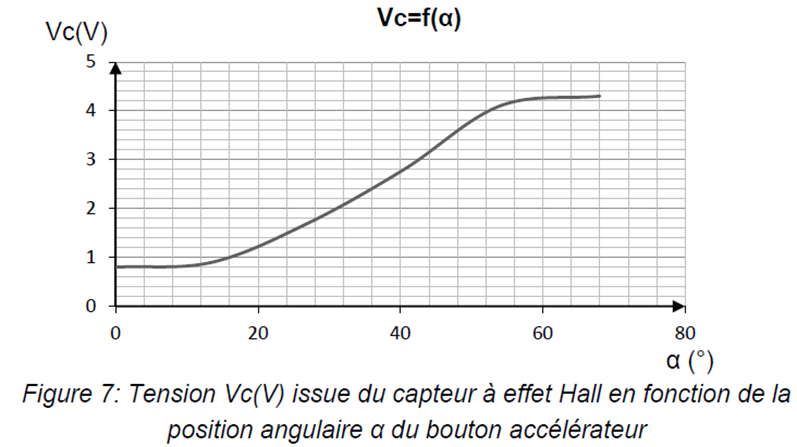
La commande de vitesse de la trottinette est un bouton rotatif situé à la hauteur du pouce droit (figure 5) sur le guidon. Ce bouton a une course angulaire de 68° (figure 6). Un capteur à effet Hall associé au bouton permet de délivrer une tension Vc en fonction de l’angle α de déplacement. La caractéristique de ce capteur est donnée figure 7.

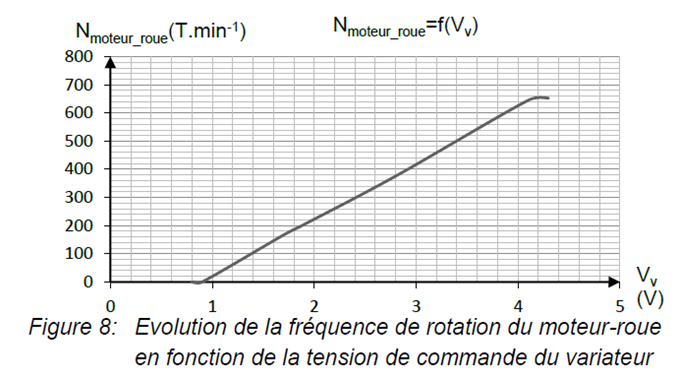
Des mesures ont permis de tracer la caractéristique de la vitesse de rotation du moteur-roue en fonction de la tension de commande du variateur Vv (figure 8).
Question II-1
Figure 8
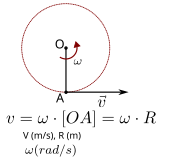
Déterminer la fréquence de rotation de la roue pour une vitesse de la trottinette de 8 km·h-1. En déduire la valeur de la tension de commande Vv 8km.h-1 pour obtenir cette vitesse.
Aide : utiliser la formule \(v=\omega \cdot R\)
On donne ci-dessous la loi de conversion Numérique Analogique (CNA) qui convertit Nv, la consigne de vitesse établie par le microcontrôleur de la carte, en Vv, la tension de commande du variateur :
\(V_v=\frac{5}{255} \cdot N_v \leftrightarrow N_v=\frac{255}{5} \cdot V_v\)
La communication entre le microcontrôleur et le CNA utilise le protocole UART-série.
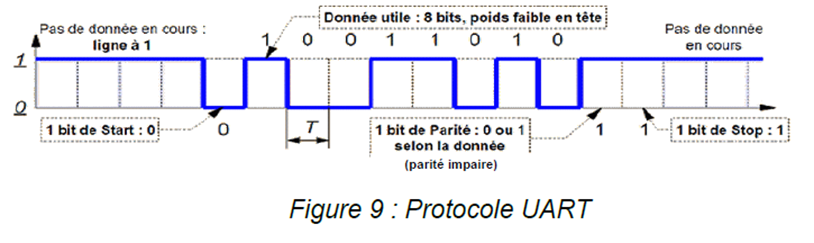
La valeur transmise ici est (01011001)2 soit (89)10.
Question II-2
DR3
Calculer la valeur Nv8km.h-1 que doit transmettre le microcontrôleur au CNA pour obtenir une vitesse de la trottinette de 8 km·h-1. Convertir cette valeur décimale en binaire. Représenter sur le chronogramme du document réponse DR3 l’allure de la trame transmise par le microcontrôleur.
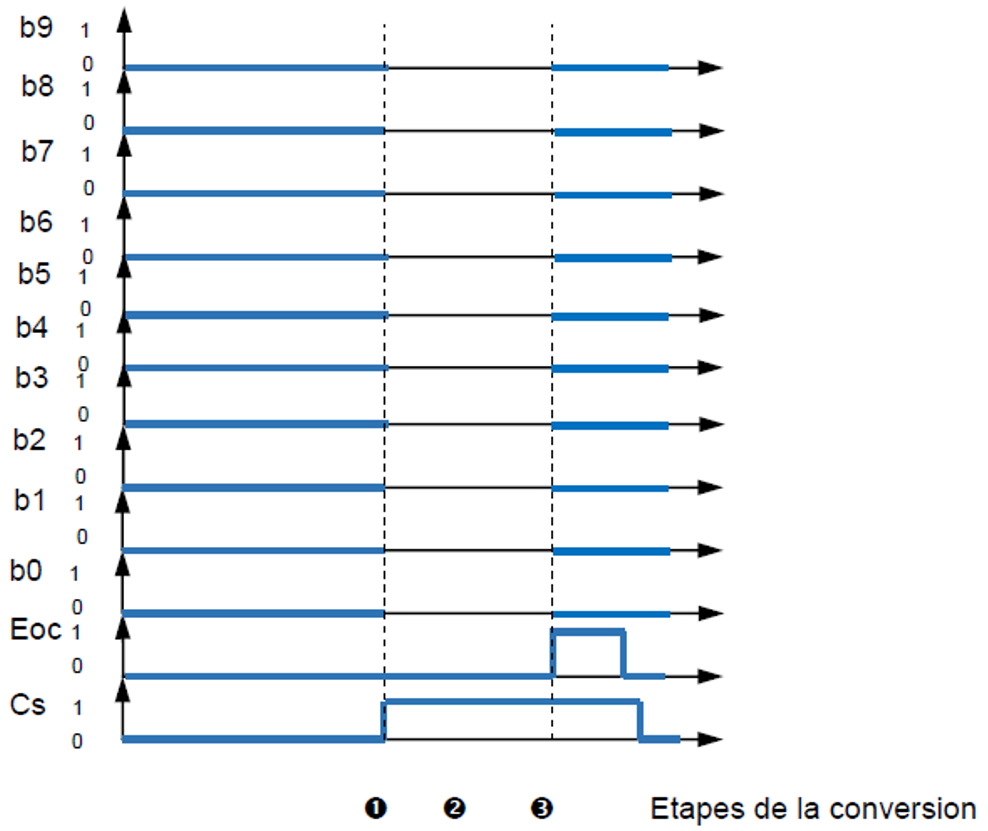
Protocole de Conversion Analogique Numérique
❶ Lorsque le microcontrôleur veut acquérir l’information αnum il envoie une commande CS au CAN (Convertisseur Analogique Numérique).
❷ Celui-ci réalise la conversion, et transmet l’information sur 10 bits par liaison parallèle
❸ Puis il valide la conversion du signal EOC.
La loi de conversion du CAN est donnée ci-dessous :
\(\alpha_{num}=\frac{1024}{5} \cdot V_c \)
Question II-3
Figure 7
DR4
Déterminer la valeur binaire numérisée par le CAN pour un angle de rotation du bouton de 40°. Représenter sur le document réponse DR4 (étape ❷) la valeur des 10 bits de données présents sur la liaison parallèle. B0 est le bit de poids faible.
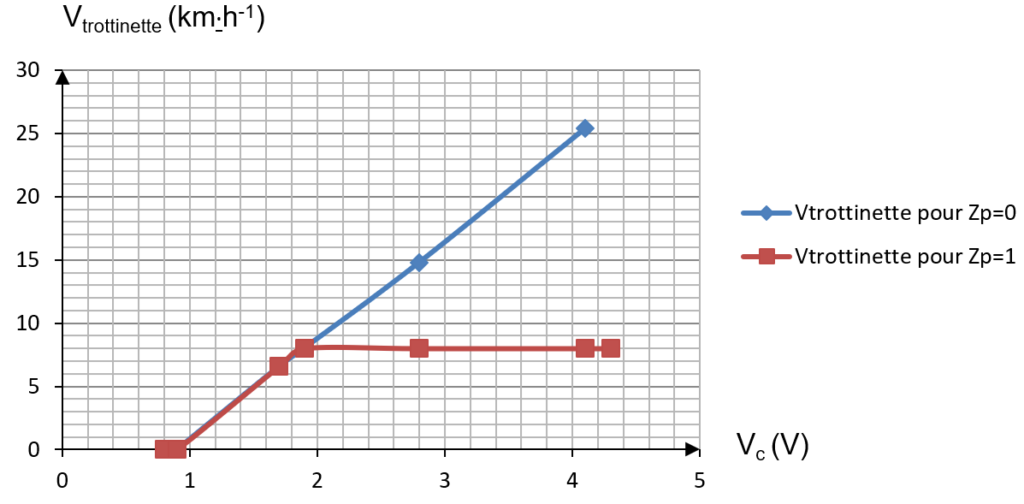
Une variable Zp (présence de la trottinette dans la zone piétonne) est calculée à partir des données GPS, la figure 10 décrit les lois de commande dans les différents cas :
- ZP = 1 : trottinette présente dans la zone piétonne
- ZP = 0 : trottinette en dehors d’une zone piétonne.
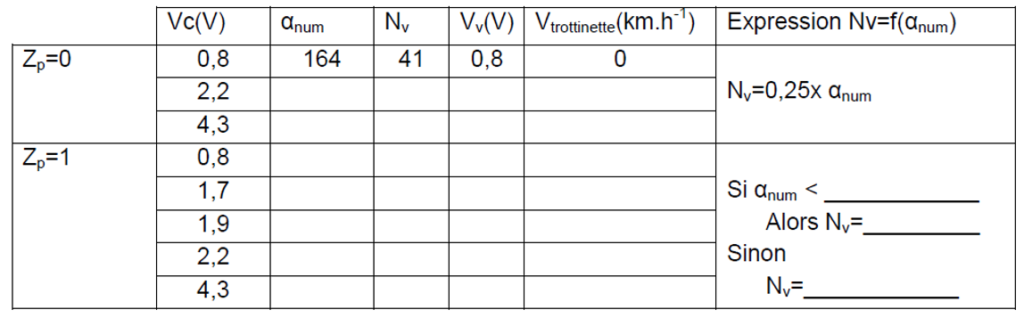
Question II-4
Figures 7 et 10
DR5
Compléter sur le document réponse DR5 les colonnes αnum, Nv et Vv, permettant d’associer une consigne de vitesse Vv en fonction de la tension Vc délivrée par le capteur du bouton accélérateur et la variable Zp. Établir l’algorithme de calcul de Nv dans le cas où Zp=1.
Question II-5
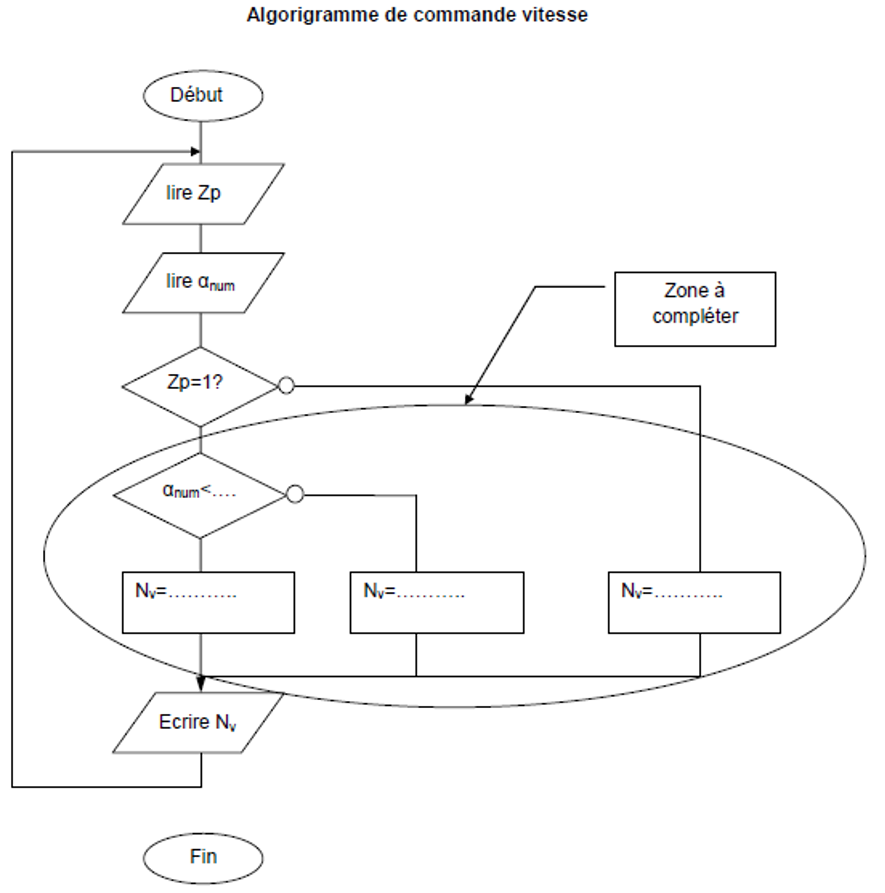
DR6
Dans le cas où la trottinette se trouve en zone piétonne, déterminer la valeur Nv à ne pas dépasser pour une consigne de vitesse Vtrottinette_Zone_Piétonne de 8 km·h-1. Compléter l’algorigramme du document réponse DR6 permettant d’obtenir la commande en vitesse du moteur.
Question II-6
Conclure sur la conformité de la solution proposée par rapport à la problématique énoncée : « Comment adapter la limitation de vitesse de la trottinette en fonction de la zone dans laquelle elle est utilisée ? »
DOCUMENTS REPONSES
DR 3 : Question II.2
DR 4 : Question II.3
DR 5 : Question II.4
DR 6 : Question II.6