PRÉSENTATION DU SURF ELECTRIQUE OU E-SURF

Plus facile à pratiquer que le surf conventionnel, le surf électrique peut être appris par un amateur en 5 min. Les chutes sont moins fréquentes, donc
l’amusement est plus rapide. Plus besoin non plus de prendre des grosses vagues, il peut avancer sur une eau lisse comme sur une eau formée. Contrairement à la planche de surf tractée, la technologie électrique apporte un rendu plus silencieux et moins polluant. Il devient même plus facile de prendre des vagues : à l’aide d’une télécommande, on accélère lorsque la vague s’élève et on stoppe le moteur une fois qu’on est lancé. C’est grâce au foil, la petite aile située sous la planche (Voir figure 2), et un groupe propulseur (moteur, hélice), que l’engin s’élève au-dessus de l’eau.
ÉTUDE DES PERFORMANCES DU E-SURF
Problématique : dans les conditions aux limites stipulées par le fabricant, le groupe propulseur est-il suffisamment performant pour élever au-dessus de l’eau un surfeur de 85 kg sur la planche à une vitesse de 35 km.h-1. Tout en garantissant une résistance et une fiabilité optimales.
La gravité est donnée à \(g = 9,81 m \cdot s^{-2}\)
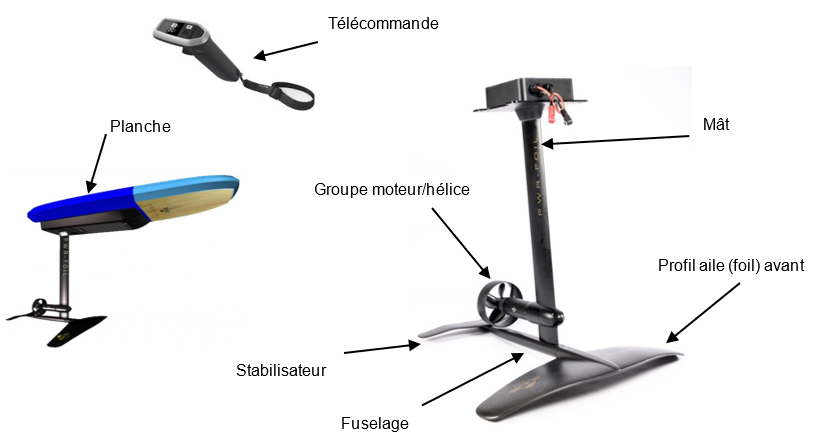
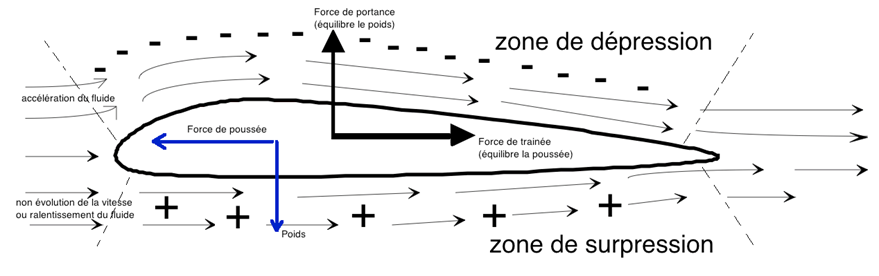
Un foil (ou un hydrofoil) est une aile profilée (figures 2 et 3) qui se déplace dans l’eau. La vitesse de déplacement génère sur le foil une portance hydrodynamique capable de soulever un objet partiellement ou totalement hors de l’eau. Le but de ce transfert de portance est de réduire le frottement (visqueux dans notre cas) et donc la puissance nécessaire à la propulsion. Si on déplace dans un fluide (air ou eau) un profil asymétrique, il se crée une différence de pression entre le dessous du profil (surface la plus faible ou intrados) et le dessus (surface la plus grande ou extrados). Voir figure 3.
\(F_z=\frac{1}{2}\cdot \rho \cdot S \cdot C_z \cdot v^2\)
Formule de la Portance
La force Fz qui tend à faire monter le profil s’appelle la portance.
avec :
Cz : Coefficient de portance.
ρ : 1025 kg.m-3 (masse volumique de l’eau de mer
S : 0.08 m² (surface « projetée » sur l’axe z)
V : Vitesse de déplacement en m.s-1
\(F_x=\frac{1}{2}\cdot \rho \cdot S \cdot C_x \cdot v^2\)
Formule de la Portance
La force Fx (tel qu’écrit ci-contre) est un frottement fluide (turbulent) qui s’oppose au déplacement.
avec :
Cx : Coefficient de portance.
ρ : 1025 kg.m-3 (masse volumique de l’eau de mer
S : 0.08 m² (surface « projetée » sur l’axe x)
V : Vitesse de déplacement en m.s-1
Si on fait varier l’angle d’incidence α (Figure 4), les valeurs des coefficients de portance Cz et de traînée Cx varient comme présenté dans le tableau 5.

| Incidence | 0° | 2° | 4° | 6° | 8° | 10° | 12° | 14° | 16° |
| Cz | 0.05 | 0.1 | 0.15 | 0.2 | 0.25 | 0.3 | 0.33 | 0.34 | 0.32 |
| Cx | 0.006 | 0.006 | 0.0065 | 0.008 | 0.0105 | 0.012 | 0.014 | 0.016 | 0.02 |
Question I-3 Tableau 5
Le surfeur peut incliner la planche grâce à ses appuis. Définir alors l’angle d’incidence minimum αminimum pour soulever l’ensemble
Dimensionnement partiel du groupe moteur-arbre-hélice
La vitesse doit atteindre 35 km.h-1. La figure 6 présente la chaîne de puissance partielle. Les résultats présentés ci-après sont issus de simulations.
Pm : puissance sur l’arbre moteur
Fp : force de poussée de l’hélice.

On rappelle que Phélice = Fp.V
Question I-4
Calculer le rendement entre l’arbre moteur et l’hélice. Commenter ce résultat
Conditions de résistance hydrodynamique de l’hélice
Augmenter la portance des objets profilés sans pour autant augmenter de façon exagérée ses dimensions, implique d’augmenter la vitesse du surf. Cela implique, souvent, une augmentation de la fréquence de rotation du moteur, donc de l’hélice. Cependant, cette solution atteint voire dépasse elle aussi très vite les limites à cause d’un phénomène particulier : la cavitation. Cette limite est variable et dépend des paramètres liés à l’environnement (profondeur d’immersion, température, salinité, forme de l’hélice…). C’est un phénomène d’ébullition dû à une dépression avec apparition de bulles de vapeur qui vont avoir des effets très néfastes sur le fonctionnement comme le décrochage du profil, l’apparition de bruits et de vibrations, d’usure voire la destruction de la surface.
La figure 8 montre la variation de dépression répartie sur une pale en fonction du régime moteur ainsi que la limite de cavitation, calculée à 100 617 Pa.
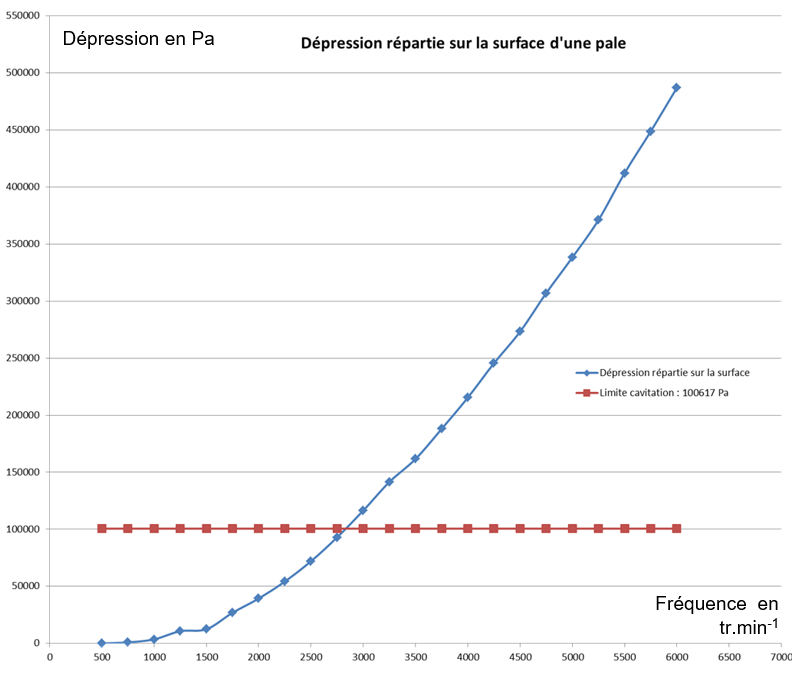
Figure 8 : courbe d’évolution du risque de cavitation de portance en fonction de la vitesse de rotation de l’arbre moteur
Question I-5 Figure 8
Préciser, pour la fréquence de rotation étudiée de 3 000 tr.min-1,si le phénomène de cavitation existe. Évaluer à partir de quelle valeur de fréquence de rotation apparaît ce phénomène.
Conclusion sur les performances générales de ce dispositif.
Question I-6
Conclure, par rapport aux différents points abordés, sur les capacités de cet engin à respecter les contraintes du cahier des charges
Proposer des solutions techniques pour améliorer ses performances
MODIFICATION DU COMPORTEMENT DU E-SURF
Dans le cadre de leurs activités proposées pendant les vacances scolaires à des enfants de 6 à 13 ans et plus particulièrement aux enfants de plus de 7 ans ayant validé un test natation/voile, de nombreux centres de loisirs sans hébergement (C.L.S.H.) basés sur le littoral méditerranéen souhaitent élargir leur gamme d’activités nautiques afin de leur faire découvrir des expériences inédites sur l’eau et de leur permettre d’accéder à de nouvelles sensations sportives en toute sécurité. Séduits par l’équipement de sport nautique grand public nouvelle génération, « la planche de surf électrique volant ou e-surf », ils
s’interrogent sur son acquisition car ils savent que le surf électrique peut être une expérience très tendue, surtout pour les débutants. Cela peut être aussi fatiguant, assez épuisant. Habituellement, après 15 minutes, une pause est nécessaire.
C’est la raison pour laquelle le constructeur du e-surf est sollicité afin de rendre la commande du mouvement plus adaptée à un tout jeune public au petit gabarit et d’y associer un fonctionnement davantage personnalisé.
Pour permettre l’évolution des jeunes surfeurs débutants ou non chevronnés, deux tranches d’âge sont prises en compte :
Groupe 1 / Tranche d’âge : 6-10 ans pour une masse embarquée de 15 à 22 kg
Groupe 2 / Tranche d’âge : 10-13 ans pour une masse embarquée de 22 à 36 kg
Pour chaque groupe sont associés trois niveaux de performance : niveau 1 débutant, niveau 2 confirmé, niveau 3 expert.
Problématique : développer pour le jeune surfeur débutant de moins de 40 kg un programme permettant de :
- gérer automatiquement la vitesse de déplacement de la planche de surf en fonction de la consigne donnée par le jeune surfeur,
- informer à chaque démarrage le jeune surfeur du niveau de charge de la batterie,
- gérer le temps écoulé.
Pour un confort d’utilisation et une progression dans les étapes d’apprentissage, plusieurs vitesses de déplacement de consigne sont imposées.
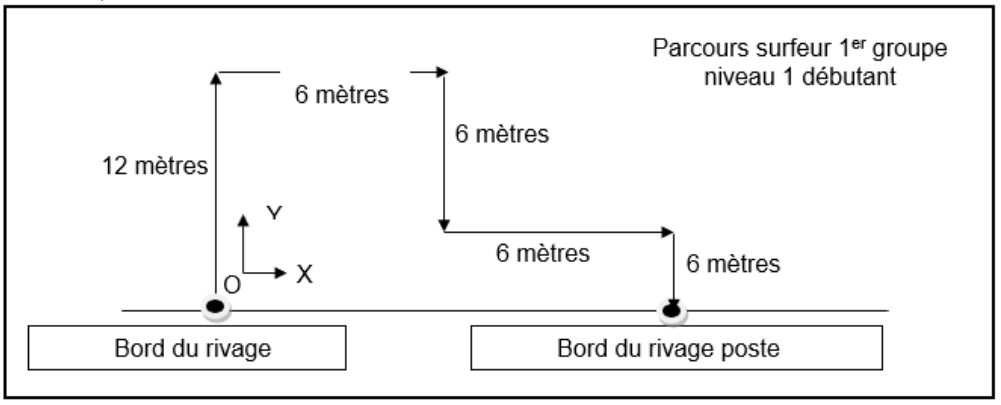
Pour commencer, on désire faire évoluer le surfeur débutant niveau 1 du premier groupe en lui proposant d’effectuer des allers retours dans le plan (O, X, Y) à la vitesse de 1 km.h-1 selon un profil d’apprentissage décrit dans la figure 9 (vitesse constante, pas de vol au dessus de l’eau) :
Question II-1
Figure 9
Déterminer la durée de ce parcours. En déduire en une heure, le nombre de démarrages que va effectuer le e-surf si l’on prend en compte uniquement une pause du jeune surfeur de 10 minutes entre deux parcours successifs.
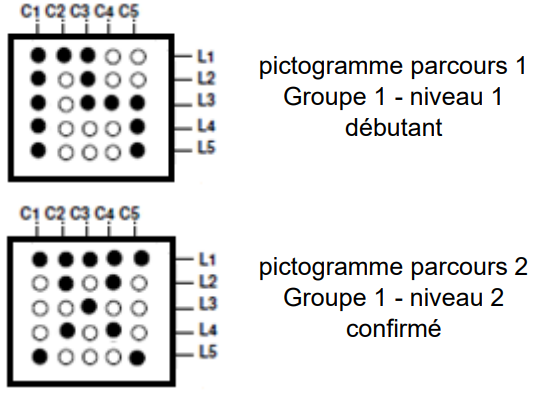
Dans la pratique, comme il s’agit de la première prise en main d’une planche de surf, un accompagnement davantage soutenu est nécessaire pour les surfeurs du groupe 1. Sur le boitier de la télécommande, le constructeur envisage d’indiquer le secteur d’apprentissage dans lequel va évoluer un surfeur du groupe 1 par des pictogrammes. Il pense au choix d’une matrice à 25 DEL réparties sur 5 lignes et 5 colonnes (voir figure 10), commandée par le microcontrôleur de la carte de commande afin que le jeune surfeur visualise quel type de parcours est associé à son niveau (figure 11).
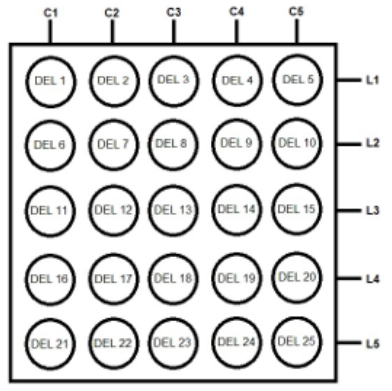
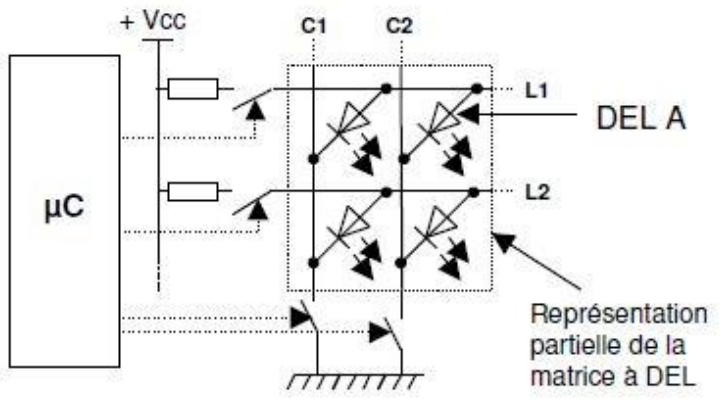
Pour commander une DEL, il suffit d’activer sa ligne et sa colonne.
Pour commander la DEL A, il faut activer sa ligne et sa colonne (soit L1 et C2 du schéma
ci-contre) ce qui nécessite d’utiliser deux sorties du microcontrôleur.
Question II-2
Figure 10
Indiquer quelles sont les DEL de la matrice de la figure 10 qui devront s’allumer pour afficher le pictogramme du parcours 1. Indiquer quelles sont les lignes et les colonnes qu’il est nécessaire d’activer pour allumer DEL 13 et DEL 21.
Le microcontrôleur possède 2 ports de sorties de 8 bits chacun dédiés à la commande des DEL de la matrice.
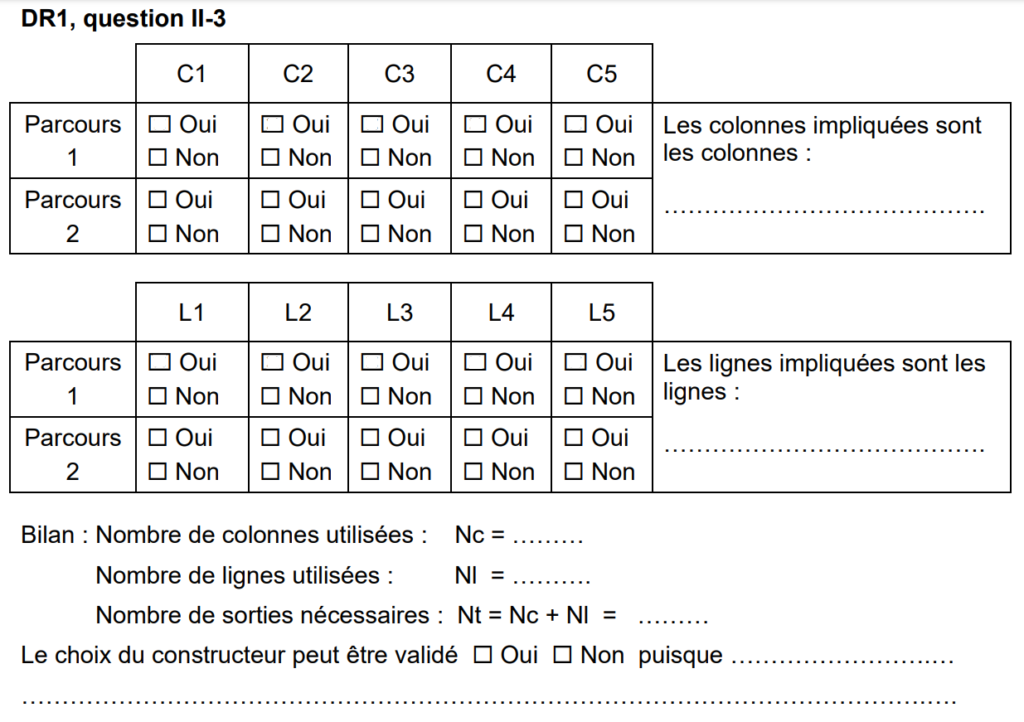
Question II-3
DR1
Déterminer le nombre de sorties du microcontrôleur disponibles pour l’affichage des pictogrammes. Afin de valider le choix du constructeur, compléter le tableau (DR1).
Lorsque la réussite du parcours 1 a été enregistrée par le moniteur du centre de loisirs, les jeunes apprentis surfeurs doivent emprunter le parcours 2 et imposer une consigne de vitesse de déplacement du e-surf égale à 5 km.h-1
.
Pour assurer le pilotage de l’engin dans une plage de réglage de vitesse 0-20 km.h-1, adaptée aux jeunes surfeurs du groupe 1, le constructeur propose d’utiliser une fonction de programmation du microcontrôleur : la commande de la vitesse du moteur par PWM (PWM, pour Pulse Width Modulation, ou MLI en français pour Modulation de Largeur d’Impulsion).
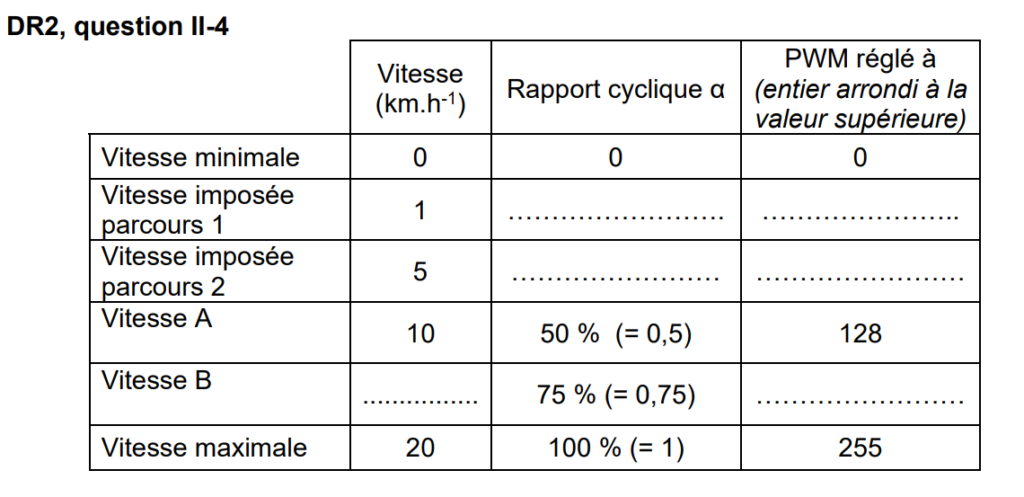
Question II-4
DR2
Compléter le tableau du document réponse (DR2).
On souhaite un démarrage progressif. Par appui sur un bouton poussoir BP+, la vitesse augmente progressivement jusqu’à la valeur de consigne : on incrémente la valeur de la variable N_vitesse d’un palier PWM correspondant à 1 km.h-1
Question II-5
Relever la valeur de ce palier PWM trouvé dans la question précédente.
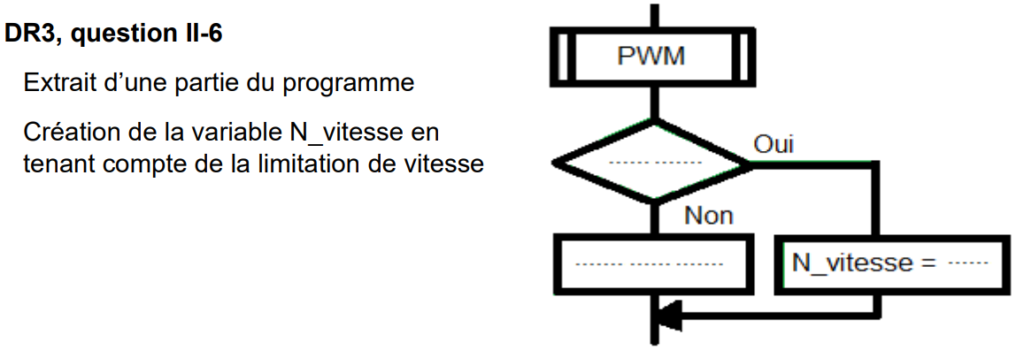
On souhaite insérer le limiteur de vitesse dans le programme gérant le rapport cyclique.
Question II-6
DR3
Compléter les éléments de l’algorigramme (DR3) de façon à créer la variable N_vitesse qui tient compte de la limitation en vitesse.
Pilotage du e-surf – groupe 2
Pour assurer le pilotage de l’engin dans une plage de réglage de vitesse 0-15 km.h-1, adaptée aux jeunes surfeurs du groupe 2, le constructeur propose alors d’intégrer dans la télécommande un potentiomètre RP d’une valeur de \(10 k \Omega\)
La tension URP (image de la vitesse) ne doit pas dépasser 5V à l’entrée du microcontrôleur lorsque la valeur de la vitesse est maximale (15 km.h-1) comme l’indique le schéma ci-contre.
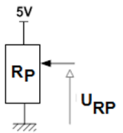
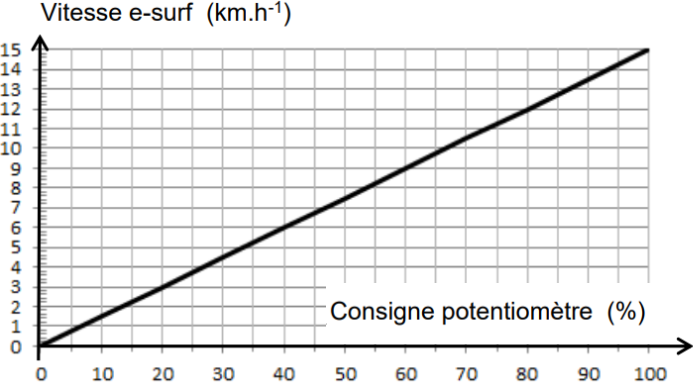
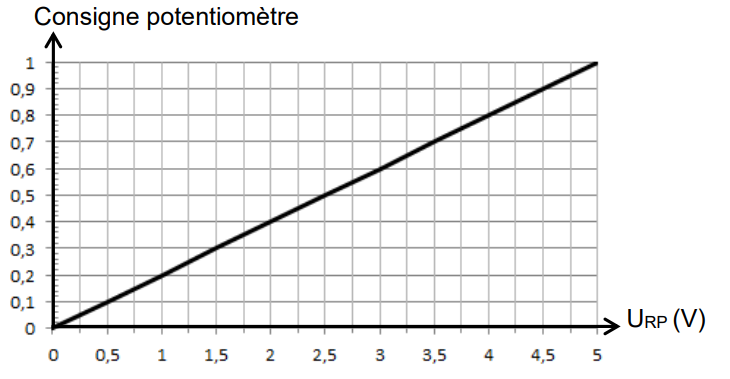
Les figures 10 et 11 fournissent les relations existant entre les différentes grandeurs.
Question II-7
Figure 12 et 13
Déterminer la consigne de réglage du potentiomètre entrainant une vitesse de déplacement de 8 km.h-1, vitesse à partir de laquelle le surfeur a la sensation de voler au-dessus de l’eau. Déduire la tension URP qui correspond à cette consigne.
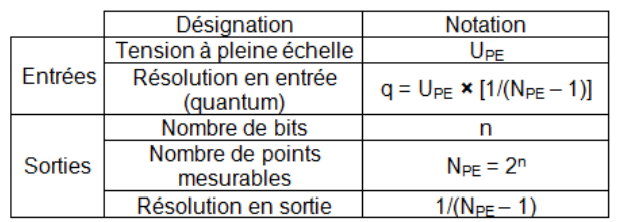
Le microcontrôleur va opérer à une conversion analogique numérique de URP. Le signal est numérisé par un convertisseur analogique numérique sur 8 bits.
Question II-8
Calculer la valeur du quantum pour cette conversion.
Question II-9
Déterminer la valeur décimale de la conversion de la tension URP correspondant à V=8 km.h-1
Le 1er profil de vitesse imposé est fourni sur la figure 15 suivante :
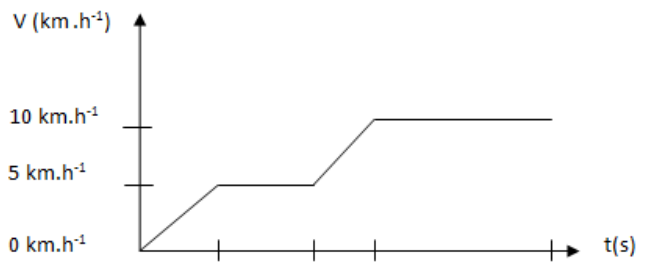
Question II-9
Déterminer les valeurs décimales de la conversion de la tension URP correspondant à V=0 km.h-1, 5 km.h-1 , 10 km.h-1, 15 km.h-1
DOCUMENTS RÉPONSES